
 | Os hackers de hardware Ben Katz e Jared Di Carlo quebraram o recorde anterior de resolução robótica do cubo de Rubik. A máquina deles resolveu o quebra-cabeça em 0,38 segundos, uma melhoria de 40% em relação ao recorde anterior de 0,637. Eles notaram que todos os solucionadores automatizados rápidos do Cubo de Rubik estavam usando motores de passo e pensaram que poderiam fazer melhor se usassem motores melhores, já que um controlador de motor personalizado permite que uma única volta do Cubo de Rubik seja concluída em cerca de 10 milissegundos. |
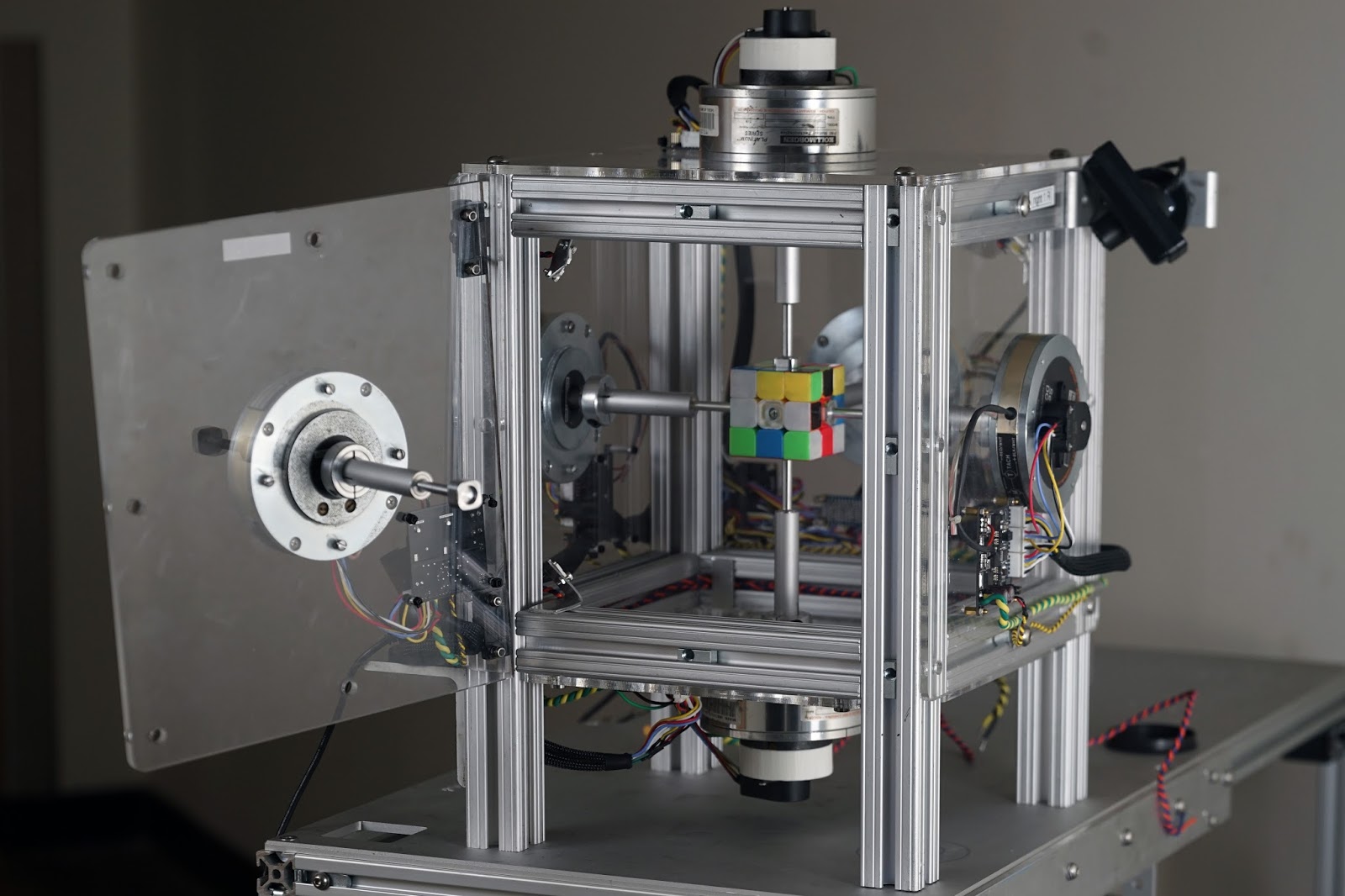
Com uma solução típica do Cubo de Rubik levando de 19 a 23 voltas, isso deve permitir que um cubo seja resolvido em cerca de 0,25 segundos, mas a dupla diz que a iteração atual da máquina faz um movimento a cada 15 milissegundos.
- "A máquina pode definitivamente ir mais rápido, mas o processo de ajuste é realmente demorado, pois a depuração precisa ser feita com a câmera de alta velocidade, e os erros geralmente quebram o cubo ou explodem as peças ", escreveu Ben. - "Por enquanto, Jared e eu perdemos o interesse em melhorar o projeto eletrônico, mas podemos voltar a ele eventualmente e cortar mais 100 ms ou mais."
Enquanto um jogador humano estaria inclinado a afrouxar o cubo para torná-lo mais fácil de virar, Ben diz que descobriu que a abordagem oposta funciona melhor para a resolução de robôs.
- "Quando o cubo está solto -como seria se uma pessoa estivesse tentando resolvê-lo rapidamente-, as faces externas apenas se deslocam para fora quando você tenta girar as faces centrais rapidamente", explicou. - "Foi preciso apertar o cubo além do que intuitivamente parecia apropriado para impedir que a ação de came acontecesse."
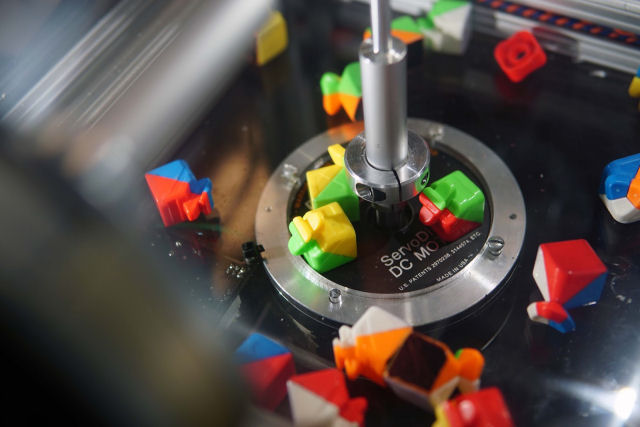
Para detectar o estado atual do cubo, Ben e Jared adquiriram um par de webcams Playstation 3 Eye por US$ 7 cada. Eles as posicionaram em cantos opostos do cubo, permitindo que cada câmera observasse três faces. Como as câmeras tinham dificuldade em distinguir rostos vermelhos e laranjas, eles pintaram as peças laranjas de preto para destacá-las melhor.
- "O software identifica todas as cores, constrói uma descrição do cubo e a passa para o solucionador", escreveu Jared. A solução é então enviada por meio de um cabo serial para os seis motores, um para cada face do cubo. Todo o processo, desde a captura da imagem até o envio das instruções aos motores, leva cerca de 45 milissegundos.
O MDig precisa de sua ajuda.
Por favor, apóie o MDig com o valor que você puder e isso leva apenas um minuto. Obrigado!
Meios de fazer a sua contribuição:
- Faça um doação pelo Paypal clicando no seguinte link: Apoiar o MDig.
- Seja nosso patrão no Patreon clicando no seguinte link: Patreon do MDig.
- Pix MDig: 461.396.566-72 ou luisaocs@gmail.com
Faça o seu comentário
Comentários